
Your car has a built-in meeting system that 99% of people don’t know the name of. Have you ever wondered that a car has dozens of brains (ECUs), how do the brakes, accelerator, windows, and AC… Talk to each other? Its not WiFi, not Bluetooth. It is a bus with jus two wires, called the CAN Bus.
What is CAN Bus?
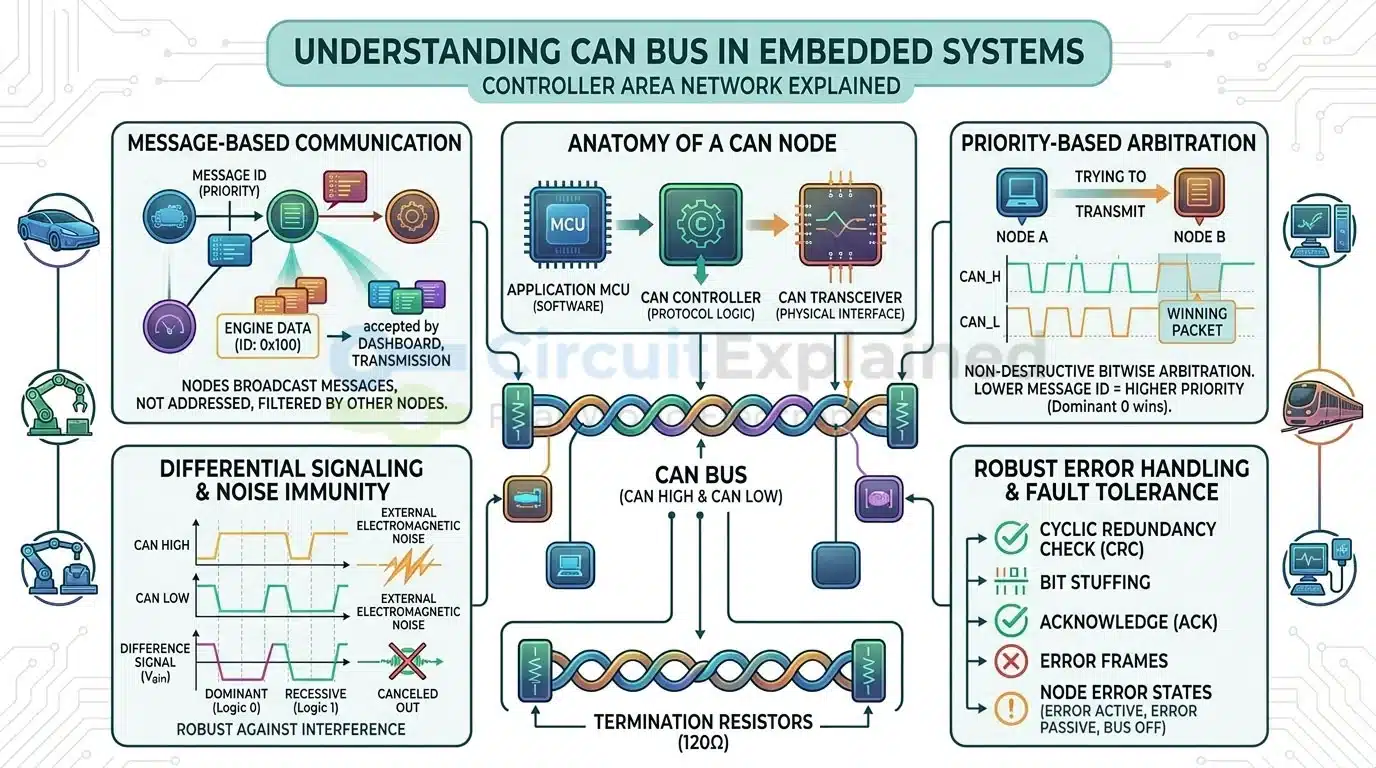
The CAN bus (Controller Area Network) is a robust can communication protocol that allows multiple electronic control units (ECUs) to communicate over a shared can network without a central computer. Furthermore, It’s the language + wiring system that lets your car function as one coordinated machine.
The Core.
The CAN bus is the meeting rule for your car. Multiple modules share one line, and rules decide who gets to speak and who must be quiet.
1. Only two wires , yet it’s interference-resistant.
CAN_H and CAN_L are the twisted into a pair (two wires wound around each other), transmitting a differential signal (the voltage difference between the two wires is the real signal). External noise interferes with both wires simultaneously, and it cancels out when subtracted.
A 120 Ohms termination resistor is attached at each end to prevent the signal from “bouncing” and clashing at the end of the line.
2. Who speaks first is determined by ID competition, not arguing.
What if multiple nodes transmit data at the same time? They compare frame IDs; the smaller the ID, the higher the priority.
Each node checks the bus bit by bit as it transmits: For instance, If you send a “1” (recessive) but read a “o” (dominant), it means someone has higher priority, so you quietly back off.
This is called non-destructive arbitration (the loser doesn’t retransmit, letting the winner proceed).
3. If there’s an error, it handles itself without dragging everyone else down.
Each node has an error counter:
An error -the counter increases;
Return to Normal -the counter decreases.
Over 127 – “Passive Error” mode: listen only, don’t transmit.
Over 255 – Automatically go offline, actively exit the bus, and not drag down other nodes.
The Hidden Hardware: Controllers & Transceivers
Most people miss this critical part of the can protocol:
- CAN Controller → Handles logic (frames, arbitration, error detection)
- CAN Transceiver → Converts logic signals into physical signals on CAN_H & CAN_L
Together, they make can bus communication possible.
You’ll also find:
- CAN connectors / can bus connector interfaces
- Diagnostic tools like can bus decoder devices used by engineers
Every time you hit the brakes, the ABS, ESP, and engine management system complete a round of “meetings” in milliseconds-
all thanks to this protocol, invented back in 1986. It’s also running in industrial robots, drones, and medical equipment.
It’s unassuming, but it supports the entire foundation of industrial connectivity.
Want to see a diagram explaining LIN, FlexRay, or Ethernet protocols? Let me know in the
comments!
If you found this useful, like and save it.
Learn More:
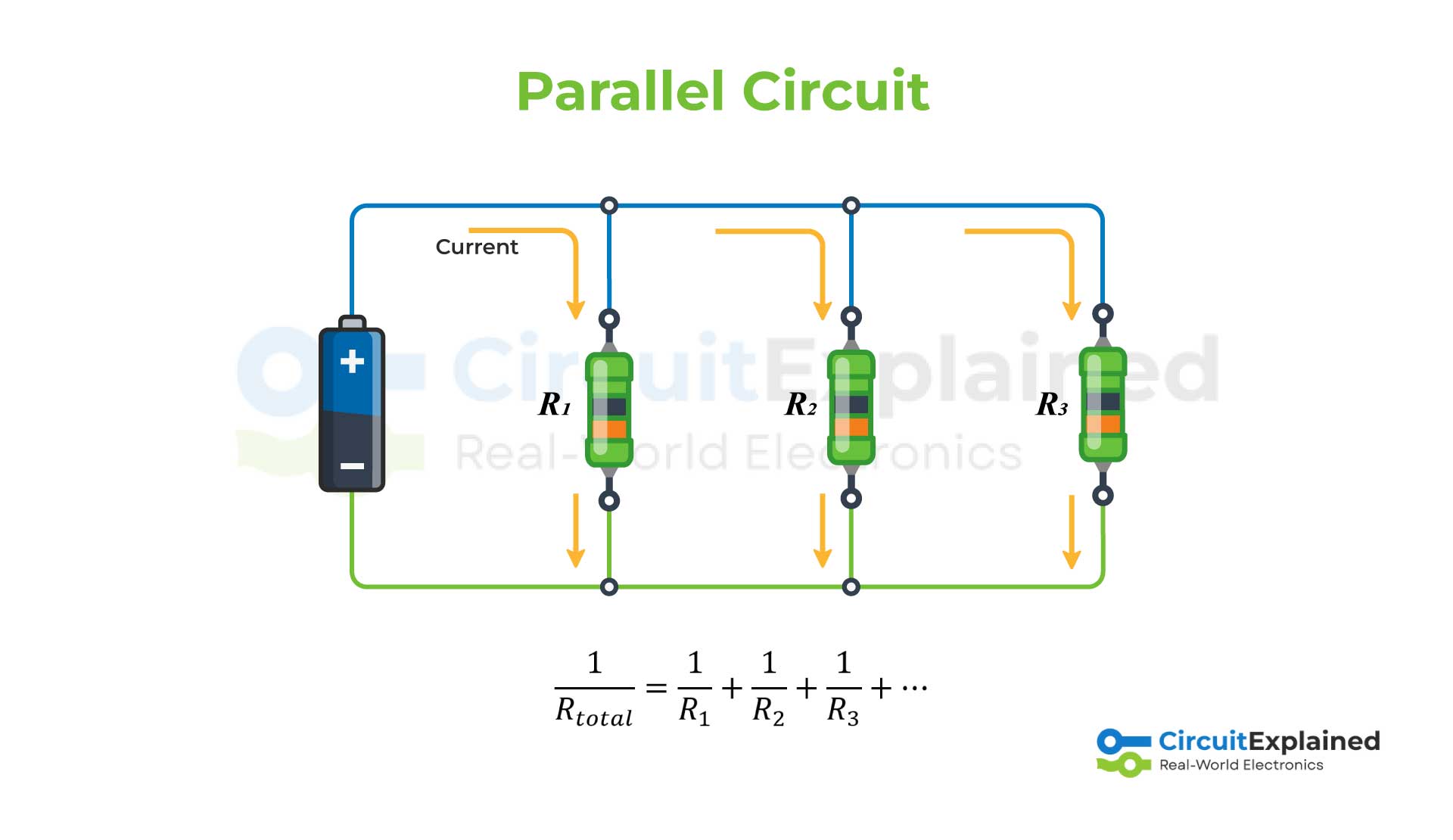
parallel-Resistance-circuit-Circuit-Explained
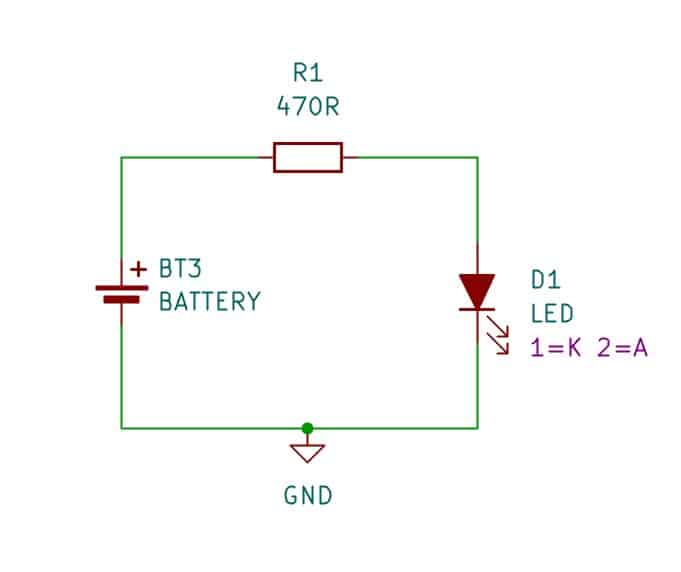
Reading Circuit diagram
{kind=link}
{kind=link}